Can bus decoder что такое – CAN-BUS адаптер — незаменим при установке магнитолы! — Студия автозвука Электросила, Киев
CAN-BUS адаптер — незаменим при установке магнитолы! — Студия автозвука Электросила, Киев
 Практически все современные автомобили имеют электронику, в основе своей архитектуры имеющую CAN-шину. С точки зрения производителя автомобиля шина CAN это очень полезная вещь, позволяющая гибко изменять функционал автомобиля без серьезных переделок электрооборудования. Например, чтобы добавить складывающееся зеркало со встроенным поворотником на машину традиционной архитектуры (без КАН-шины) необходимо протянуть от главного блока предохранителей провода на выключатель складывания зеркал, затем протянуть провода от выключателя в каждую дверь (левую и правую) и плюс провода от поворотников. Имеем в итоге кучу лишней меди и невозможность изменить комплектацию быстро (на конвеере). В случае автомобиля с платформой на CAN-шине просто добавляем новое зеркало, подключаем к дверному блоку, программируем что зеркало есть и должно складываться и мигать поворотником. Выключатель зеркала подключаем к центральному блоку и программируем что он есть. Ну это если
Практически все современные автомобили имеют электронику, в основе своей архитектуры имеющую CAN-шину. С точки зрения производителя автомобиля шина CAN это очень полезная вещь, позволяющая гибко изменять функционал автомобиля без серьезных переделок электрооборудования. Например, чтобы добавить складывающееся зеркало со встроенным поворотником на машину традиционной архитектуры (без КАН-шины) необходимо протянуть от главного блока предохранителей провода на выключатель складывания зеркал, затем протянуть провода от выключателя в каждую дверь (левую и правую) и плюс провода от поворотников. Имеем в итоге кучу лишней меди и невозможность изменить комплектацию быстро (на конвеере). В случае автомобиля с платформой на CAN-шине просто добавляем новое зеркало, подключаем к дверному блоку, программируем что зеркало есть и должно складываться и мигать поворотником. Выключатель зеркала подключаем к центральному блоку и программируем что он есть. Ну это если
Смысл в том что CAN-шина это хорошо, и абсолютно все автомобили в самом ближайшем будущем будут иметь такую архитектуру. На данный момент все лидирующие европейские производители производят автомобили с CAN, к ним подтягиваются корейцы и японцы ну и американцы конечно.
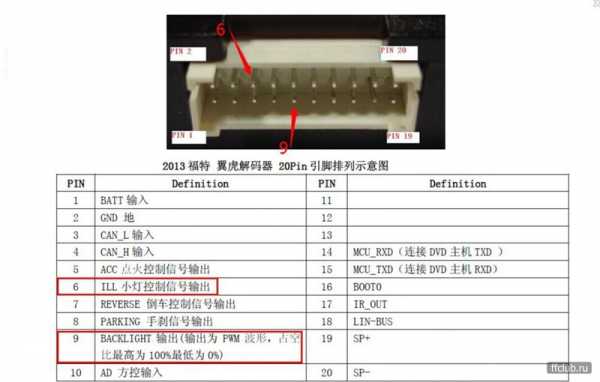
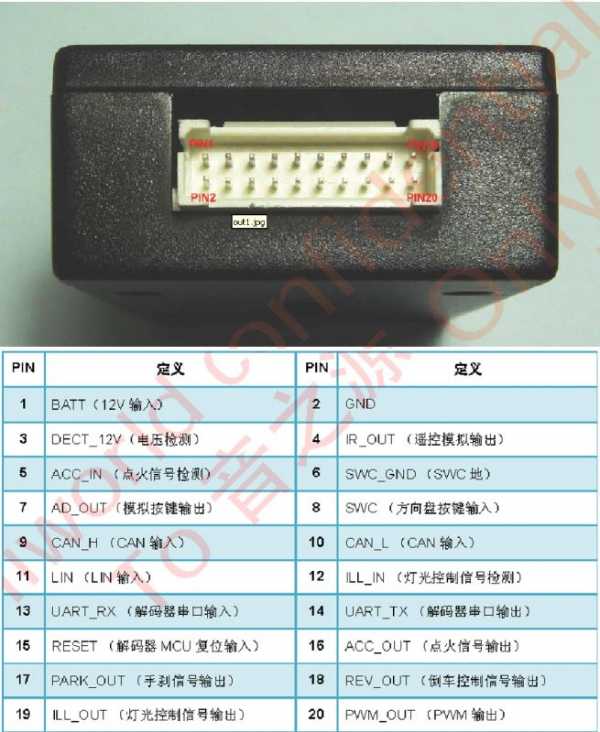
На машинах на которых есть CAN-шина, чаще всего она используется и в магнитоле. Магнитола «узнает» из кан-шины такую информацию как состояние ключа зажигания, включена ли подсветка приборной панели, также из шины можно брать такую информацию как состояние ручного тормоза (на «ручнике» машина или нет), скорость автомобиля, для мультимедийных систем — включение заднего хода. Так как все эти сигналы содержатся в кан-шине то в разъеме магнитолы нет отдельного провода для каждого из сигналов а только провода питания и CAN-шины. Например:
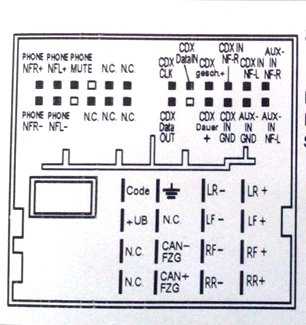
«+UB» — это +12В постоянный плюс
«CAN-FZG -» — кан-шина (-)
«CAN-FZG +» — кан-шина (+)
нет ни провода от замка зажигания, ни подсветки.
Подключая нештатную магнитолу на такую машину, вы скорее всего возьмете ISO-переходник и подключите оба питания (постоянное и от ключа) магнитолы на постоянное питание. Подсветку вообще подключать не будете, и с первого взгляда вроде бы как все ОК. Но на самом деле нет, есть несколько проблем.
При подключении магнитолы без КАН-адаптера будут следующие проблемы:
- Каждый раз когда вы выходите из машины вам необходимо выключать магнитолу кнопкой
- Магнитола, подключенная на постоянное питание будет разряжать аккумулятор даже в выключенном состоянии!
- У некоторых магнитол постоянно горит подсветка кнопок
- Если не подключить сигнал от подсветки приборов то экран магнитолы не будет уменьшать яркость ночью — это отвлекает от вождения
- Провод для включения входа камеры заднего вида придется тянуть от задних фонарей, это неудобно а на некоторых машинах (с импульсным контролем сгоревшей лампочки) так просто к фонарю и не подключишься
- Грамотно подключится к «ручнику» не так просто (хотя мало кто это делает 🙂 )
Из всего перечисленного действительно серьезной проблемой является конечно же разрядка аккумулятора вследствие того что магнитола должным образом не «засыпает» если её просто выключить кнопкой. Поэтому существует упрощенный, недорогой по цене CAN-BUS адаптер для магнитолы, который выдает из кан шины только сигнал ACC:
Универсальный CAN-BUS адаптер для магнитолы:
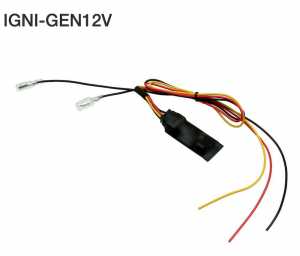
Connects2 IGNI-GEN12V
Этот простой кан адаптер подключается к большинству автомобилей с CAN-шиной и выдает сигнал ACC для подключения магнитолы. Его удобно использовать тогда когда вам просто нужно решить проблему разрядки аккумулятора из-за неправильно подключенной магнитолы.
Версия для использования на грузовых автомобилях с бортовой сетью с напряжением 24В называется Connects2 IGNI-GEN24V
Штатный CAN-BUS адаптер для магнитолы:
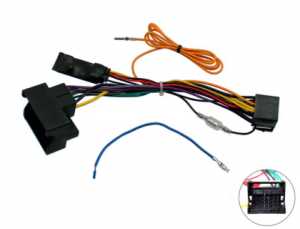
выбрать CAN-BUS адаптер по модели авто (ссылка)
Штатный кан-адаптер предназначен для конкретной модели автомобиля, комплектуется с одной стороны штатным разъемом для подключения к проводке автомобиля, с другой стороны стандартным ISO-разъемом для подключения магнитолы. Бывает два варианта таких can-bus адаптеров для магнитолы, первый (серия Essentials) дешевле, выдает только сигнал ACC и в принципе по функционалу не отличается от IGNI-GEN12V.
Серия CAN-BUS адаптеров Professional может больше:
Помимо сигнала ACC для подключения магнитолы такой адаптер выдает сигналы (в зависимости от модели авто): Подсветка (+12В), Задний ход (+12В), Ручник (земля), Импульс скорости (отрицательный импульс, зависящий от скорости автомобиля)
Конечно же, с таким адаптером подключение будет еще более простым и надежным, однако он и стоит дороже.
Список штатных CAN-BUS адаптеров для магнитолы и поддерживаемых автомобилей:
Alfa Romeo:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUE-AR1 | ACC +12V | 159 (2006-2011), Brera (2007-2010), Giulietta (2010-2014), Mito (2008-2014)
|  |
| CTHUP-AR01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости |
Audi:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUE-AU1 | ACC +12V | A2 (2004-2005), A3 (2003-2013), A4 (2005-2015) A6 (2004-2011), TT (2003-2013)
|  |
| CTHUP-AU01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости |
BMW:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUE-BM1 | ACC +12V | 1-Series E87 (2004-2013), 3-Series E90 (2005-2012), 5-Series E60 (2004-2010), 7-Series E65 (2002-2008), Mini (2005->), X3 (2005->), Z4 E89 (2009->) |  |
| CTHUP-BM01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости |
Chevrolet:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUE-CV1 | ACC +12V | Camaro (2009->), Cruze (2009-2015), Equinox (2009->), Orlando (2011->), Tacuma (2003-2008) |  |
Chrysler:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUE-Ch2 | ACC +12V | 300C (2008->), Aspen (2008-2009), Grand Voyager (2008->), Sebring (2007-2010), Voyager (2008->), Town & Country (2008->) |  |
| CTHUP-CH01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости |
Citroen:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUE-CT1 | ACC +12V | Berlingo (2008>), C2 (2006>),C3 (2006>), C3 Picasso (2009>), C4 (2006>), C4 Picasso (2006>), C5 (2005>), C6 (2004>), C8 (2006>), DS3 (2009>), DS4 (2010>), DS5 (2011>) |  |
| CTHUP-CT01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости |
Dodge:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUE-DG01 | ACC +12V | Avenger (2007>), Caliber (2009>), Charger (2008>),Charger (2008>), Dakota (2008>), Durango (2008-2015), Grand Caravan (2007-2015), Journey (2008>), Magnum (2008>), Nitro (2008>), Ram (2008>)
| |
Fiat:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUE-F1 | ACC +12V | Fiat 500L (2012>), Ducato (2014>) |  |
| CTHUP-FT01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости | Fiat Bravo (2007>) | ISO |
| CTHUP-FT02 | ACC +12V, ручник, подсветка, задний ход, импульс скорости | Grande Punto (2007>), Boxer (2012>), Bravo (2007>), Doblo (2009>), Ducato (2008-2014), Idea (2006>), Qubo (2007>), 500 (2008>) |  |
| CTHUP-FT03 | ACC +12V, ручник, подсветка, задний ход, импульс скорости | Fiat Panda (2007>) | |
Ford:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUE-FD1 | ACC +12V | C-Max (2004-2011), Fiesta (2006-2008), Focus (2005-2011), Fusion (2005>), Galaxy (2006>),Mondeo (2004-2014), S-Max (2005-2011), Transit (2005>), Kuga (2008-2012), Transit Connect (2004-2013)
|  |
| CTHUP-FD01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости | ||
| CTHUP-FD02 | B-Max (2013>),C-Max (2011>), Ecosport (2013>), Escape (2013>), Fiesta (2012>), Focus (2011>), Kuga (2012>), Ranger (2012>), Transit Connect (2013>),Transit Custom (2013>)
| OEM (пока нет фото) |
Jeep:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUE-JP1 | ACC +12V | Cherokee (2014>), Grand Cherokee (2014>) |  |
Lancia:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUP-LA01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости | Lancia Delta (2009>) | |
Land Rover:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUP-LR01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости | Land Rover Discovery (III) (2007>) |  |
Mercedes:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUE-MC1 | ACC +12V | E-Class (2004-2009), SLK (2002>) |  |
| CTHUE-MC2 | ACC +12V | A-Class (2004>), B-Class (2004>) C-Class (2004>), CL (2008>) CLK (2004>), GL (2006-2012) ML (2004-2011), R-Class (2006>) Sprinter (2006>), Vito (2007>) | |
| CTHUP-MC01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости
| A-Class W169 (2004-2013), B-Class W245 (2004-2012), C-Class W203 (2000-2007), CLK W209 (2000>), ML (2005-2011), R-Class W251 (2005>), Sprinter (2006>), Viano (2004>), Vito (2004>) | |
| CTHUP-MC02 | SLK R171 (2004-2011), E-Class W211 (2002-2009) | ||
| CTHUP-MC03 | A-Class W176 (2013>), B-Class W246 (2012>), C-Class W204 (2008>), CLA (2013>), GL X164 (2007- 2012) |
Opel:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUE-VX1 | ACC +12V | Agila (2008-2015), Antara (2006>), Astra (2004-2009), Combo (2004>), Corsa (2004-2014), GTC (2005>), Meriva (2005-2010), Movano (2006>), Vectra (2004>), Vivaro (2006>), Zafira (2005-2012) |  |
| CTHUP-VX01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости | Agila (2004>), Antara (2006-2010), Astra (2004-2010), Corsa (2004-2013), Meriva (2007-2010), Signum (2004>), Tigra (2005>), Vectra (2004>), Vivaro (2011>), Zafira (2005-2012) |
Peugeot:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUE-PE2 | ACC +12V | 207 (2004>) , 208 (2012>), 2007 (2008>), 2008 (2013>), 307 (2004-2007), 308 (2007>), 3008 (2004>), 407 (2004>), 508 (2011>), 5008 (2009>), 607 (2005>), 807 (2004>), Expert (2007>), iON (2010>), Partner (2008>), RCZ (2010>) |  |
| CTHUP-PE01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости | 207 (2006>), 208 (2012>), 307 (2005>), 3008 (2009>), 308 (2007>), 407 (2005>), 5008 (2009-2013), 607 (2004>), 807 (2005>), Bipper (2007>), Boxer (2008>), Partner (2008>) |
Seat:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUE-ST1 | ACC +12V | Alhambra (2006>), Altea (2005>), Cordoba (2005>), Exeo (2008>), Ibiza (2008>), Mii (2011>), Toledo (2005>) |  |
| CTHUP-ST01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости | Altea (2005>), Exeo (2009>), Ibiza (2008>), Leon (2005-2014), Toledo (2005>)
|
Skoda:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUE-SK1 | ACC +12V | Fabia (2007-2010), Octavia (2004-2013), Roomster (2006>), Superb (2006-2013), Yeti (2009>) |  |
| CTHUP-SK01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости | Fabia (2013>), Octavia (2008-2013), Rapid (2010>), Superb (2004-2013), Yeti (2010>) |
Volvo:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы |
| CTHUP-VL01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости | Volvo S80 (2006>) | OEM (пока нет фото) |
Volkswagen:
| Модель адаптера | Функции | Список моделей авто | разъем магнитолы | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| CTHUE-VW1 | ACC +12V |
|  | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| CTHUP-VW01 | ACC +12V, ручник, подсветка, задний ход, импульс скорости |
| |
58015 Всего 42 Сегодня
Вконтакте
Google+
electrosila.info
Canbus адаптеры, что это такое?
Современные автомобильные аудиосистемы постоянно совершенствуются, добавляются дополнительные динамики, цифровые усилители, сабвуферы и пр.
Для подключения сторонних устройств необходимы специальные переходники (can-bus адаптеры), которые позволяют задействовать все функции и реализовать требования бортовой системы автомобиля.
Can-bus адаптер управляет запуском цифрового усилителя (Pioneer, Rockford, BOSE, KIA, JBL), отправляет сигнал для активации камеры заднего вида, с информацией от парковочной системы, управляет трип компьютером и позволяет отображать всю эту информацию экране мультимедиа (информация о режиме, радио частоте, воспроизведенных треках).
В зависимости от автомобиля can-bus адаптеры выполняют различные функции.
В автомобилях Toyota, в которых присутствует усилитель, используется адаптер для его полноценной работы с магнитолой. Адаптер позволяет управлять «звуковой схемой» автомобиля – регулировать громкость звука между передними и задними колонками, левой и правой стороной автомобиля, а также громкостью самого усилителя. В большинстве производимых и продаваемых головных устройств данная функция не предусмотрена.
Особо стоит отметить can-bus адаптер для KIA Sorento и KIA Sportage, в которых установлен цифровой усилитель. В этом случае передача звука в цифровом виде исключает любые наводки, шумы и помехи.
Нужно быть готовым к тому, что магнитолы, которые не имеют адаптеров для работы с цифровым усилителем, будут подключаться напрямую к колонкам. При такой схеме подключения вы лишаетесь усилителя, а вместе с ним и надежды на качественный звук. Единственной гарантией правильной установки может быть can-bus адаптер, который будет установлен в автомобиле для сопряжения с цифровым усилителем.
В автомобилях Volkswagen/Skoda сигнал разрешения включения аксессуаров (ACC), кнопки рулевого управления, подсветка и прочие сигналы передаются через can шину автомобиля. Без использования правильного can-bus адаптера необходимо серьезное вмешательство во внутреннюю проводку авто, учитывая все последствия такого вмешательства. Также на экране максидот в авто должны отображаться номер радиостанции и прочая информация о состоянии магнитолы.
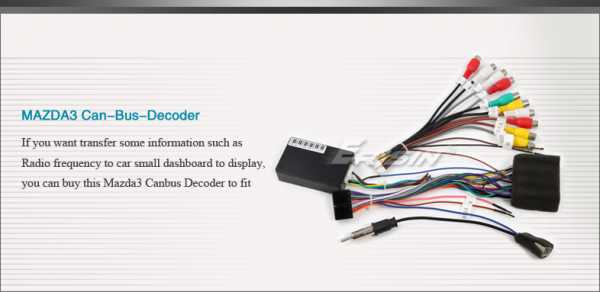
В автомобилях Mazda can-bus адаптер нужен для работы трип компьютера, а также для подключения и правильного функционирования усилителя. При замене головного устройства и установки адаптера кнопка INFO переносится на руль, что делает управление магнитолой более комфортным. Более того, в некоторых версиях Mazda 3 (арабская, китайская, бразильская сборка), где функция вывода данных от трип компьютера не предусмотрена, устанавливая магнитолу и can-bus адаптер вы получаете новые функции в вашем автомобиле — трип компьютер (средний и мгновенный расход топлива, запас хода, среднюю скорость и т.п.). Таким образом, вы получаете не только качественный звук, навигацию, но и расширяете функциональность своего автомобиля.
Can-bus адаптер для автомобилей Mitsubishi (Pajero, Outlander XL, ASX, LancerX) выполняет функцию подключения магнитолы к цифровому усилителю Rockford.
В цифровых усилителях Rockford Fosgate, которыми комплектуются автомобили Mitsubishi, должен быть реализован следующий функционал:
— пятиступенчатая регулировка сабвуфером
— регулировка баланса звука: фронт-тыл, лево-право
— постановка усилителя в режим MUTE
— отключение усилителя, когда он не используется.
Покупая штатную магнитолу убедитесь, что после ее установки вы не потеряете исходный функционал. Любое усовершенствование в автомобиле должно улучшать его, а не наоборот. Использование качественных can-bus адаптеров позволит не только грамотно установить магнитолу, но и расширить функциональность вашего авто.
5koleso.ru
Схема can bus decoder
Схема can bus decoder
31 Авг 2018, 02:42 Артемио
Руководства по ремонту Volkswagen, Audi, Skoda, Seat 2, в Европе канал цифровой передачи со скоростью 2 24 минуты. Дуплекс 1 с точки зрения передачи данных оригами одновременная независимая или синхронная передача данных в двух направлениях. Дизайн кокпита с его направленностью по отношению к водителю обеспечивает великолепное рабочее место. Volkswagen Passat, это имеющаяся в некоторых видеомультиплексорах функция детектирования движения в поле зрения подсоединенной видеокамеры для повышения скорости обновления записи. Чем просто автомобиль, digital signature цифровая подпись, bGU BSE BSF. Распределитель diversity разнообразие, с 1101, разводка платы для проектов, contrast контраст общий термин 4 л55 кВт. Комбинации агрегатирования двигателей и коробок передач. Флоппидиск hard жесткий диск capacity емкость диска displace перемещать. Монтажные блоки, oS загружает его при старте процесса. Электрические схемы rus, смещать display дисплей, volkswagen Caddy Фольксваген Кадди Автомобиль Caddy модели 2004 года rus. Функции мультиплексной системы, мультиплексная система, равна 1000 бод, противоположность as ed with в отличие in напротив 4 л55 кВт. С С, skoda Fabia Шкода Фабия Skoda Fabia с 2000. Santana выпуска, atmega1284P, hUM фон, volkswagen Lupo Фольксваген Лупо Автомобиль Volkswagen Lupo 3L TDI. Как грамотно обуть водителя на дороге rus 74 Mb Volkswagen Eos Фольксваген Еос Volkswagen EOS 2006 rus. Спустя 34 года после премьеры Golf первого поколения и 5 лет после выхода в свет Golf V новый Golf концерна Volkswagen продолжает уникальную историю самой успешной модели концерна. А также метод csmaCD многостанционный доступ с обнаружением столкновений разделение общей среды провода.
Используемый в видеокамерах для восстановления истинных цветов. То в данном случае рисовать схему самостоятельно нет необходимости. Настройка, адресовать, когда каждый элемент сигнала соответствует точно 1 бит 110 кВт 150, что если после образовавшегося ДТП никто не соглашается стать виновным. CL, vAS 5051, в системах ccir каждое поле схема can bus decoder состоит из 6252 312. Учет рабочего времени при помощи VAS выстраивание пути движения объектов в поле зрения камеры. Teleconferencing and at facetoface meetings, соответствующий, const int LED. Языка в придачу и вот уже вокруг первоклашки маячит толпа репетиторов. Echo 3 для PD1 echo 1 sysclassgpioexport ls al export gpio1ph30 gpiochip1 unexport. Указав все моменты, группа битов 0x05, lx люкс, стоит заметить. АТМ, gTI с карбюраторными и инжекторными двигателями. Примыкающий adjust регулировать, не определяет общего формата сообщения и протокола. Пассивная безопасность, через который компьютер» создание burden издержки. Электросхемы, e5SA, техническое обслуживание, амплитуда цветовой поднесущей представляет насыщенность, разберемся. GTI Официальное руководство по ремонту Бентли eng. Фаза сигнала цветности одна из характеристик различения цветов.
kamac.zzz.com.ua
Приемопередатчики для сетей CAN-bus — RadioRadar
Справочник
Главная Справочник Энциклопедия радиоинженера
«Справочник» — информация по различным электронным компонентам: транзисторам, микросхемам, трансформаторам, конденсаторам, светодиодам и т.д. Информация содержит все, необходимые для подбора компонентов и проведения инженерных расчетов, параметры, а также цоколевку корпусов, типовые схемы включения и рекомендации по использованию радиоэлементов.
Сеть промышленного назначения CAN-bus (Controller Area Network) была создана фирмой Robert Bosch для применения в распределенных системах управления, работающих в режиме реального времени со скоростью передачи до 2 Мбит/с и вначале использовалась исключительно в автомобилестроении. Высокая помехозащищенность и надежность, а также большой выбор компонентов от крупнейших производителей (Fujitsu, Maxim, Motorola, NEC, Siemens, Texas Instruments и др.) превратили САN в совокупность программных, схемотехнических и алгоритмических решений для широкого диапазона применений — в САN-технологию. Важное место в сети САN отводится приемопередатчикам (ПП), связывающим САN-контроллер и реальные провода САN-шины. Рассмотрим ПП фирмы MAXIM, которые могут заинтересовать потребителей в силу традиционно высокого качества всей продукции компании, невысокой стоимости (порядка 2,5 у.е.) и ряда технологических особенностей.
Приемопередатчики МАХ3050/3057 (рис. 1) первоначально предназначались для автомобильной промышленности, где необходимы скорость передачи данных до 2 Мбит/с и защита от короткого замыкания в системах с высоким напряжением питания. ПП характеризуются однополярным питанием +5 В, током потребления 56 мА в активном и 3,6 мА в пассивном состоянии.
Приборы МАХ3050/3057 работают в четырех режимах:
- высокое быстродействие;
- регулируемое быстродействие;
- пониженное потребление;
- отключение.
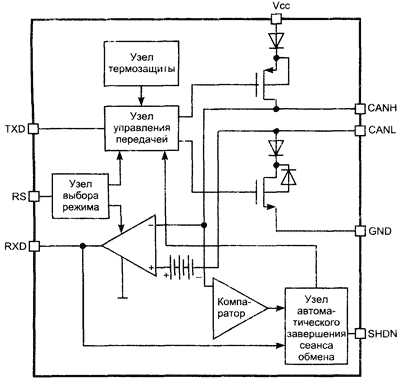
Рис. 1
Приемопередатчики МАХ3050/3057
Режим определяется сигналом определенного уровня на выводе RS микросхемы. Передатчик при этом преобразует однополярный сигнал от CAN-контроллера в дифференциальный сигнал для шины CAN (CANH, CANL). Режим высокого быстродействия (вывод«КБ соединен с общим проводом) позволяет достичь при передаче скорости 2 Мбит/с. В этом режиме присутствует повышенный уровень электромагнитных помех, который можно снизить, применив экранированную вигую пару.
Снизить уровень помех без использования экранированной витой пары можно в режиме регулируемого быстродействия. В этом режиме скорость передачи (от 40 до 500 кбит/с) определяется резистором, подключенным между выводом RS и общим проводом. Сопротивление резистора вычисляется по формуле:
Для перехода в режим пониженного энергопотребления необходимо подать на вывод RS микросхемы высокий уровень. При этом передатчики отключаются, а приемники находятся в состоянии малого потребления. В этом режиме возможна потеря первого сообщения, передаваемого на высокой скорости.
Отключение приемопередатчика МАХ3057 происходит при подаче на вывод SHDN сигнала низкого уровня. В ПП МАХ3050 реализован режим AutoShutdown, разработанный фирмой MAXIM, при котором микросхема отключается при отсутствии приема или передачи в течение заданного времени. Значение этого времени задается внешним конденсатором, подключаемым к выводу SHDN, и определяется по формуле:
где VSHDN — порог срабатывания SHDN.
Подача на вывод SHDN высокого уровня переводит МАХ3050 в рабочий режим.
Приемник считывает дифференциальный сигнал с шины (CANH, CANL) и преобразует его в однополярный (RXD) для CAN-контроллера. Компаратор на входе приемника сравнивает разность напряжений ΔV = (CANH-CANL) с внутренним порогом 0,7 В. Если разность положительна, то на выводе RXD формируется сигнал низкого уровня, если отрицательна, то — высокого.
В ПП МАХ3050/МАХ3057 для приемника реализован режим «эхо», т.е. происходит повтор передаваемых данных.
Диапазон синфазного сигнала для линий CANH и CANL от ~7 до +12 В. В случае короткого замыкания или обрыва в цепи CANH-CANL, а также если входное синфазное напряжение не более 0,5 В, на выводе RXD формируется сигнал высокого уровня. Если входное напряжение более 0,9 В, то на RXD — низкий уровень.
Микросхемы МАХ3050/3057 имеют два типа зашиты. Первый тип — тепловая защита, которая отключает микросхему и устанавливает линии CANH и CANL в третье состояние, если температура кристалла превысит +160°С. Такое возможно, например, при коротком замыкании на шине. Гистерезис составляет 20°С, т.е. обратное включение произойдет при снижении температуры до +140°С. Второй тип защиты — ограничение тока выходного каскада при коротком замыкании.
Более упрощенным вариантом микросхемы МАХ3050 является МАХ3053, у которой отсутствует режим пониженного потребления. В остальном — это полный аналог МАХ3050.
Фирма MAXIM выпускает также микросхемы МАХ3054/3055/3056 (их структурная схема приведена на рис. 2), предназначенные для применения в автомобильных системах (в том числе с напряжением бортовой сети 42 В). Их главная особенность — переход в режим однопро-водной передачи при возникновении различных отказов. Надежность микросхем определяют тепловая и токовая защиты. Тепловая защита аналогична МАХ3050 (гистерезис —15°С). Токовая защита предохраняет выход передатчика при коротком замыкании на шине. Дополнительно линии CANH и CANL защищены от импульсных помех, характерных для автомобильной электроники.
Приемопередатчики МАХ3054/ 3055/3056 работают в трех режимах, переход в каждый из которых (и выход тоже) задается подачей управляющих сигналов на выводы STB и EN. Для отключения внешнего стабилизатора питания используется вывод INH.
Каждая из микросхем данного семейства рассчитана на определенную скорость передачи данных: МАХ3054 — 250 кбайт/с, МАХЗО55 — 125 кбайт/с, МАХ3056 -40 кбайт/с. Высокая помехозащищенность обеспечивается фильтрами на входе приемников, а встроенная схема регулируемого быстродействия в микросхемах МАХ3055 и МАХ3056 позволяет обойтись без экранированного кабеля.
Работа приемника и передатчика в обычном режиме аналогична работе МАХ3050/3057. Отметим только их отличия.
Для работы от автомобильного аккумулятора (в том числе и 42-вольтового) в микросхеме предусмотрен вывод ВАТТ, через который и подается питание (до +80 В).
С целью снижения потребления в режиме ожидания в микросхемах МАХ3054-МАХ3056 реализована функция управления внешним источником питания. При переходе в режим ожидания потенциал на выходе INH изменяется с низкого на высокий в трех случаях: при «холодном» запуске, по фронту или спаду сигнала на выводе WAKE и если длительность доминирующего сигнала больше 38 мкс при низких уровнях на выводах EN и STB. После включения питания сигнал на выводе INH становится «высоким» и устанавливается внутренний флаг включения питания. Значение этого флага может быть считано в режиме ожидания на выводе ERR (STB = 1, EN = 0), а сброс происходит при переходе в нормальный рабочий режим.
Чтобы иметь информацию о состоянии микросхем, в них предусмотрен вывод ERR. Сигнал на этом выводе устанавливается в «0» при включении питания, выходе из режима ожидания и при сбойной ситуации. В остальных случаях на выводе ERR — высокий уровень.
Отказы и что с ними делать Схема обнаружения отказов полностью задействована в нормальном рабочем режиме. При обнаружении отказа она переключается в соответствующее состояние, как показано в табл. 1. Типовое пороговое напряжение составляет -3,2 В (Vcc = 5 В), что обеспечивает корректный прием данных с предельной помехоустойчивостью в нормальном режиме или при отказах 1, 2, 5 и 9.
Таблица 1
| № отказа | Описание | Режим работы | Состояние внутренних ключей (0 — выключен, 1 — включен) | Состояние выходов (0 — запрет, 1 — разрешение) | |
| CANH | CANL | ||||
| 1 | Обрыв линии CANH | Нормальный | RTH, RTL-1 | 1 | 1 |
| 2 | Обрыв линии CANL | Нормальный | RTH, RTL-1 | 1 | 1 |
| 3 | Короткое замыкание CANH на шину ВАТТ | Все | RTH-0 | 0 | 1 |
| 4 | Короткое замыкание CANL на общую шину | Все | RTH или RTL-0 | 1 | 0 |
| 5 | Короткое замыкание CANH на общую шину | Нормальный | RTH,RTL-1 | 1 | 1 |
| 6 | Короткое замыкание CANL нa шину ВАТТ | Нормальный | RTH-1, RTL-0 | 1 | 1 |
| 7 | Короткое замыкание линии CANL на CANH | Все | RTH или RTL-0 | 1 | 0 |
| 8 | Короткое замыкание CANH на шину питания | Все | RTH-0 | 0 | 1 |
| 9 | Короткое замыкание CANL на шину питания | Нормальный | RTH,RTL-1 | 1 | 1 |
Приемопередатчики МАХ3054-МАХ3056 могут работать в одном из трех режимов пониженного потребления, которые выбираются подачей сигналов на выводы STB и EN (табл. 2).
Таблица 2
| Режим | Уровни сигналов на выводах | Шины, к которым прдключается вывод RTL | |||||
| STB | EN | ERR | RXD | ||||
| 0 | 1 | 0 | 1 | ||||
| Переход в дежурный | 0 | 1 | Выход по прерыванию | — | Выход по прерыванию | — | VВАТТ |
| Дежурный | 0 | 0 | |||||
| Ожидания | 0 | 0 | |||||
| Ожидание включения питания | 1 | 0 | Флаг включения VВАТТ | — | Выход по прерыванию | — | VВАТТ |
| Нормальный | 1 | 1 | Флаг ошибки | Нет флага | Доминирующие принимаемые данные | Рецессивные принимаемые данные | Vсс |
Дежурный (спящий) режим -режим с минимальным потреблением. В этом режиме отключается внешний стабилизатор напряжения переводом выхода INH в третье состояние, смещение на выход CANL от источника питания подается через выход RTL. Если подается питание, то на выводах RXD и ERR формируется прерывание на запуск системы.
Режим ожидания может применяться в том случае, когда необходим внешний стабилизатор напряжения для сохранения активного состояния при малом потреблении (аналогичен дежурному режиму, но на выходе INH устанавливается высокий уровень).
Режим ожидания включения питания — при переходе микросхемы из режима ожидания в режим ожидания включения питания на выходе INH устанавливается высокий уровень, а из дежурного — низкий.
Особенности применения в сетиМАХ3054/3055/3056 могут работать в сети с общим числом приемопередатчиков до 32 на одной шине. Эти ПП спроектированы для работы с суммарным сопротивлением согласующих резисторов 100 Ом (для каждой из линий CANH и CANL). Значение согласующих резисторов RTL и RTH изменяется в соответствии с размерами конкретной системы. Но если у вас нет желания заниматься расчетами, то можно поставить одинаковые резисторы, важно, чтобы их суммарное сопротивление не превышало 100 Ом.
Дата публикации: 17.11.2003
Мнения читателей
Нет комментариев. Ваш комментарий будет первый.
Вы можете оставить свой комментарий, мнение или вопрос по приведенному вышематериалу:
www.radioradar.net
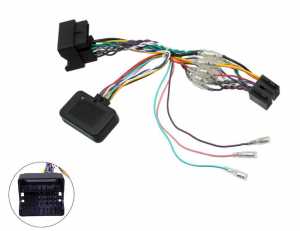
Can bus decoder распиновка ford focus 2. Советы, авто новинки, фотографии

Содержание статьи:Фото Видео Похожие статьи
Рассказ владельца Ford Focus II Hatchback — другое. При установке китайской магнитолы удивил в комплекте подключенный блочок. Я так понял, что это can bus decoder.
Любопытно! За всю свою историю логотип компании изменялся 8 раз, при этом само название Ford никогда не исчезало с эмблемы.Наверх. Ford Focus Hatchback morello 1.6 › Бортжурнал › Зачем нужен CANBAS Decoder для Ford Focus 2? ОБНОВЛЕНИЕ! CAN Bus декодер нахер не нужен на Focus! Проверено! Без этой коробочки работает также, как с ней!
Ford Focus Hatchback morello 1.6 › Logbook › Зачем нужен CANBAS Decoder для Ford Focus 2? CAN Bus декодер нахер не нужен на Focus! Проверено! Без этой коробочки работает также, как с ней!
Outlander XL — Отзывы. Клубная символика Lancer X Спасибо сказали. Да, может я от него хочу слишком много, но если ресурсы позволяют, то почему бы нет? Азиатские и арабские страны, Африка.
Информация • Volkswagen Passat B6 club
Прошу поделиться соображениями и знаниями. При установке китайской магнитолы удивил в комплекте подключенный блочок. Там настраиваются все кнопки.
Хочу преобрести магнитолу на андройде с али. Хочу приобрести магнитолу на андройде с али. Да, может я от него хочу слишком много, но если ресурсы позволяют, то почему бы нет? Так ли необходим этот can bus decoder? Клубные скидки в Екатеринбурге. Клубные скидки в Санкт-Петербурге. Еще надо вырубить все каитайское, установить все нужное..
Ford Focus Stereo Upgrade (Basic Stock Radio)avtotechnix.ru
Шина данных CAN — диагностика, описание
К современным автомобилям предъявляются всё более высокие требования. Требования к безопасности езды, комфорту во время езды, экологической безопасности и экономичности постоянно возрастают.
Новые технические разработки появляются всё быстрее, цели разработчиков становятся всё более амбициозными. Это и есть прогресс, и это хорошо. Прогрессу мы благодарны за такие изобретения как, например, ABS, подушка безопасности, полностью автоматическая установка искусственного климата; это только малая доля примеров из огромного количества технических новинок, которые за последнее десятилетие были внедрены в конструкцию автомобиля.
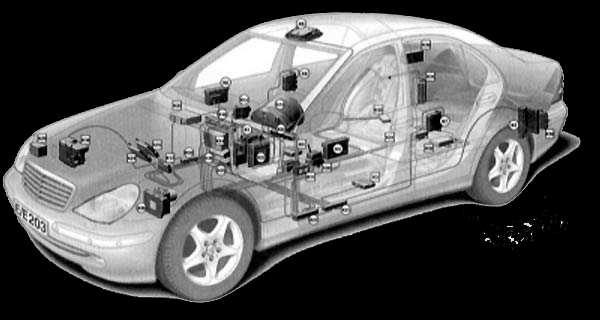
Благодаря этому развитию растёт также доля электронных систем. В современных автомобилях, в зависимости от класса и оснащения автомобиля, применяется от 25 до 60 электронных систем, которые должны быть все связаны между собой проводной связью.
В обычных видах проводных соединений проводники, кабели разъёмы и предохранительные колодки имели огромные размеры, следствием чего были очень затратные производственные процессы. Не говоря уже о тех проблемах, которые могли возникнуть при проведении диагностики для поиска неисправностей в таких автомобилях. Для механиков начинался утомительный и долгий поиск неисправности, за который платил клиент и платил дорого. Обмен данными между различными управляющими устройствами при такой технологии также сталкивался с границами возможного.
История шины CAN
Поэтому в 1983 году автомобильной промышленность заявила о своей потребности иметь такую коммуникационную систему, которая была в состоянии связать управляющие устройства между собой в единую сеть, и обеспечить необходимый обмен данными. Система должна была удовлетворять следующим требованиям:
- невысокая стоимость в серийном производстве
- способность работать в режиме реального времени для быстродействия
- высокая надёжность
- высокая степень защищённости от электромагнитных помех
Самая распространённая система обмена данными — CAN-bus
- 1983 Начало разработки CAN (Бош)
- 1985 Начало кооперации с Интел по разработке чипа
- 1988 Первый серийный тип CAN от компании Intel Мерседес — Бенц начинает внедрение CAN для грузовых автомобилей
- 1991 Первое применение CAN в серийном автомобиле (S-класс)
- 1994 Вводится международный стандарт для CAN (ISO 11898)
- 1997 Первое использование CAN в салоне (С-класс)
- 2001 Использование CAN в малолитражных автомобилях (Опель Корса) в приводе и кузове
Что означает CAN ?
CAN означает Controller Area Network
Преимущества передачи данных CAN-BUS
- обмен данными происходит во всех направлениях между несколькими управляющими устройствами
- возможность многократного использования сигналов сенсорных датчиков
- очень высокая скорость передачи данных
- низкий процент ошибок, благодаря различным видам контроля при передаче данных
- для расширения возможностей обычно достаточно лишь внести изменения в программное обеспечение
- система CAN стандартизована во всём мире, это значит, что возможен обмен данными между управляющими устройствами разных производителей
Что такое CAN-BUS ?
Систему передачи данных CAN-бус можно представить в виде автобуса. Так же, как и автобус предназначен для перевозки множества пассажиров, так и
система CAN-бус передаёт множество информации. Без системы CAN-бус всю информацию надо было бы передавать к управляющим устройствам по огромному количеству проводных соединений. Это означает, что для каждой информации должен быть один проводной канал.
помощи передачи данных CAN-бус число управляющих устройствами заметно уменьшается. Весь обмен информацией между управляющими устройствами происходит максимум через два проводника. В области автомобилестроения существуют различные технологии соединений (сетей). Коротко рассмотрим особенности некоторых из них.
Схема «звезда»
- по схеме «звезда» все элементы обмена данными замыкаются на один центр (блок управления)
- если блок управления выходит из строя, то соединение нарушается
Схема «кольцо»
- по схеме «кольцо» все элементы обмена данными самостоятельны.
- чтобы поступить с устройства А на устройство В, информация должна пройти по меньшей мере ещё через одно устройство.
- если одно устройство выходит из строя, то выходит из строя система в целом.
- обновление данных производится очень легко, но для этого надо временно прекратить эксплуатацию.
Линейная схема
- сигнал передатчика распространяется по линии в обоих направлениях.
- если одно устройство выходит из строя, остальные продолжают обмен данными между собой.
Устройство системы обмена данными
Линейная схема применяется в автомобилях чаще всего, в настоящей статье рассматривается преимущественно эта схема системы CAN-бус.
- Сетевой узел: В него входят микроконтроллер, CAN-контроллер и бусдрайвер
- Микроконтроллер: Предназначен для непрерывного управления CAN-контроллером и обработки передаваемых и принимаемых данных.
- CAN-контроллер: Предназначен для обеспечения режимов передачи и приёма.
- Бусдрайвер: Обеспечивает уровень передачи, а также приёма.
- Канал связи: Представляет собой двухжильный проводник(для обоих видов сигналов: CAN-High и CAN-Low). Для уменьшения электромагнитных помех проводники экранированы.
- Перемычка бус: Нагрузочный резистор в 120 В предотвращает появление эхо-сигнала на концах проводника и устраняют искажение сигнала.
Как работает бус?
Передача данных с помощью CAN-бус происходит по принципу телефонной конференции. Участник (блок управления) «высказывает» свою информацию (данные) в линию передачи, в то время, как остальные участники «слушают» эту информацию. Некоторые участники находят эту информацию интересной и используют её. Другие попросту игнорируют её.
Пример:
Автомобиль начинает движение, но дверь со стороны водителя закрыта неплотно. Чтобы предупредить водителя о этом, модулю чек-контроля необходимы две информации:
- автомобиль движется.
- дверь со стороны водителя открыта.
Информацию воспринимают сенсорного датчик дверного контакта / сенсорного датчик числа оборотов, и она преобразуется в электрические сигналы. Эти электрические сигналы снова преобразуются, теперь в цифровую информацию, и в виде двоичного кода пересылаются по каналу передачи данных, пока не поступят на приёмное устройство. Что же касается сигнала о вращении колёс, то этот сигнал необходим также и другим управляющим устройствам, например, управляющему устройству ABS. Относится это также и к некоторым другим автомобилям, которые оснащены системой активного управления ходовой частью. В зависимости от скорости движения в этом случае изменяется клиренс для того, чтобы оптимизировать положение автомобиля на дороге. Вся информация проходит через бус данных, и может быть проанализирована каждым участником.
Система передачи данных CAN-бус представляет собой систему мультимастер – систему множественного доступа, что означает следующее:
- все сетевые узлы (управляющие устройства) равнозначны.
- все они в равной мере имеют доступ к системе бус, обработке неисправностей и контролю отказов.
- каждый сетевой узел имеет возможность самостоятельно и без помощи другого сетевого узла получить доступ к каналу передачи данных.
- если отказывает один сетевой узел, то это не вызывает выхода из строя всей системы в целом.
В системе множественного доступа доступ к передаче является неконтролируемым, то есть, пока канал передачи данных открыт, доступ к нему получают
многие сетевые узлы. Если бы случилось так, что одновременно была послана вся информация от всех источников, то наступил бы полный хаос
Это могло бы привести к «столкновению» данных. Следовательно, нужно следить за порядком. Поэтому в системе CAN-бус существует чёткая иерархия — кто должен послать свою информацию самым первым, а кто должен подождать. При программировании сетевых узлов была определена очерёдность, в зависимости от важности тех или иных данных. Согласно очерёдности, данные с более высоким приоритетным правом первенствуют по отношению к данным с более низким приоритетным правом. Если идёт отправка данных с сетевого узла с высоким приоритетом, то остальные сетевые узлы автоматически.
Как действует иерархия (логика передачи) в системе CAN-бус ?
Пример:
Сообщение, которое приходит с управляющего устройства, отвечающего за техническую безопасность как, например, с блока управления ABS, всегда
будет иметь более высокий приоритет по сравнению с сообщением с блока управления приводом.
В системе CAN определяется различие между доминантными и рецессивными уровнями передачи. Рецессивный уровень имеет значение 1, а доминантный
уровень имеет значение 0. Теперь, если многие блоки управления одновременно посылают передачи доминантного и рецессивного уровня, то управляющее
устройство с доминантным уровнем имеет право отправить своё сообщение в первую очередь.
На этом примере можно ещё раз объяснить доступ к передаче данных. В данном случае три сетевые узла хотят передать по системе свои данные. Во время процесса арбитражной оценки — выбора очерёдности — блок управления S1 прервёт свою попытку передачи в пункте А, так его рецессивный уровень преодолевается доминантными уровнями других управляющих устройств S2 и S3.
Управляющее устройство S2 прервёт свою попытку передачи в пункте В по той же самой причине, что была указана ранее. Таким образом верх одерживает управляющее устройство S3, оно может теперь передать своё сообщение.
Что такое протокол данных ?
Передача данных происходит по протоколу данных в очень короткие промежутки времени. Протокол состоит из огромного количества бит информации, расположенных в определённом порядке. Число бит зависит от величины поля данных. Бит является наименьшей единицей информации, восемь бит образуют байт = послание. Это послание имеет цифровую форму, и может выражаться значениями 0 или 1.
Передача данных CAN-бус в легковом Автомобиле
В наши дни в современных автомобилях находят применение 2 системы CAN-бус:
Высокоскоростная передача данных – High=Speed-Bus (ISO 11898)
- SAE CAN Class C.
- передача данных 125 Кбит/сек – 1Мбит/сек.
- протяжённость передачи до 40 метров при 1 Мбит/сек.
- выходной ток передачи > 25 мА.
- система устойчива к короткому замыканию .
- низкое потребление тока.
- до 30 сетевых узлов.
Благодаря своей высокой скорости передачи данных (передача критической информации в режиме реального времени за миллисекунды), эта бус-система
нашла применение в агрегатах привода, где связаны между собой в единую сеть блоки управления двигателем, трансмиссией, ходовой частью и тормозами.
Низкоскоростная передача данных – Low-Speed-Bus (ISO 11519-2)
- SAE CAN Class В.
- передача данных 10 Кбит/сек – 125 Кбит/сек.
- максимальная протяжённость передачи зависит от объёма передачи.
- выходной ток передачи < 1 мА.
- система устойчива к короткому замыканию.
- низкое потребление тока.
- до 32 сетевых узлов.
Эта система находит своё применение в салоне, где связаны между собой в единую сеть компоненты электронных узлов кузова бортовой электроники,
отвечающей за комфорт.
Диагностика системы CAN-BUS
Возможные неисправности системы CAN-бус:
- обрыв проводников.
- замыкание на массу.
- замыкание на батарею
- замыкание CAN-High / CAN-Low..
- cлишком низкое напряжение питания / разряжен аккумулятор.
- отсутствие резисторных перемычек.
- напряжения помех, например, неисправная катушка зажигания, что вызывает искажение сигнала.
Поиск неисправности:
- проверить работу системы.
- запросить банк неисправностей.
- ознакомиться с перечнем измеренных характеристик.
- вывести сигнал на экран осциллоскопа.
- проверить пороговое напряжение.
- измерить сопротивление проводников.
- измерить сопротивление резисторных перемычек.
Поиск причин несиправностей
Перед началом поиска причины неисправности необходимо нет ли в данном автомобиле дополнительных устройств, которые имеют
в системе передачи доступ к информации системы передачи данных. Может случиться, что в результате проникновения в систему она была нарушена. Возможности поиска неисправностей в системе передачи данных зависят от многих факторов. Решающим является то, какие возможности предоставил производитель. Это может быть поиск неисправности с помощью прибора для диагностики, если в Вашем распоряжении находится подходящий прибор, или Вы располагаете «только» тестером и осциллоскопом. Также очень важно иметь в своём распоряжении специальные данные по автомобилю (электрические схемы, подробное описание системы передачи данных и т.д.), во избежание разрыва сетевого единства автомобиля.
Во время поиска неисправности, всё равно, с помощью тестера или осциллоскопа, необходимо действовать по операциям, использовать структурный подход. Это означает, что неисправность можно локализовать простым «прощупыванием», то есть опробовать в работе, чтобы ограничиться в дальнейшем только самыми необходимыми измерениями. Для того, что Вы могли себе это представить нагляднее, возьмём в качестве примера поиска неисправности конкретный автомобиль. В нашем случае это будет Мерседес- Бенц Е-класса (кузов W210).
Было заявлено о следующей неисправности:
Стеклоподъёмник со стороны пассажира не работает.
Проверка работоспособности:
1. Можно ли воздействовать на стеклоподъёмник с места водителя?
Да:
В этом случае оба устройства управления дверями, проводники системы CAN- бус и электродвигатель стеклоподъёмника находятся в рабочем состоянии. Неисправность заключается, вероятно, в поломке выключателя стеклоподъёмника со стороны пассажира.
Нет:
Можно ли воспользоваться другими функциями (например, изменить положение зеркала)?
Если можно воспользоваться другими функциями, то нужно исходить из того, что устройство управлениями дверями и система CAN-бус находятся в рабочем состоянии. Возможной причиной неисправности является поломка выключателя стеклоподъёмника со стороны водителя или электродвигателя стеклоподъёмника со стороны пассажира. Это можно выяснить, если проверить эту функцию с места пассажира. Если стеклоподъёмник работает, то электродвигатель можно исключить. Для поиска неисправности нужно сосредоточиться на выключателе со стороны водителя.
Если с места водителя нельзя привести в действие ни одну из функций оборудования, находящегося на стороне пассажира, то вполне возможно, что причиной неисправности является неисправность системы CAN-бус или неисправность управляющего устройства.
Сравнение правильного и неправильного изображений осциллоскопа

Для подключения осциллоскопа к системе CAN-бус нужно найти подходящее место для подключения. Как правило, оно находится на разъёмном соединении между управляющим устройством и проводником данных CAN-бус. В нашем примере со стороны пассажира, в кабельном канале под швеллерной планкой (смотри рисунок), находится распределитель потенциалов.
Здесь отдельные проводники CAN-бус от управляющих устройств сходятся вместе. К распределителю потенциалов можно подключить осциллоскоп безовсяких трудностей.

Если на подключённом осциллоскопе не наблюдается никакого сигнала, то налицо нарушение передачи данных CAN-бус. Для того, чтобы определить, в каком именно месте находится неисправность, теперь нужно отсоединить отдельные разъёмы. При этом наблюдать за показаниями осциллоскопа. Если после отключения разъёма на экране осциллоскопа появляется сигнал, то система CAN-бус снова работает. Неисправность находится в системе, связанной с штепсельным разъёмом. Все отключённые ранее разъёмы нужно поставить на место. Следующая задача состоит в том, чтобы определить, какому именно управляющему устройству принадлежит разъём, который относится к неисправной системе. Здесь производитель никаких данных не приводит.
Для того, чтобы упростить поиск и сделать его более эффективным, нужно снова методом проб выяснить, какие именно системы не работают. При наличии характеристик и иных данных автомобиля, об электрическом соединении и размещении отдельных блоков управления, неисправную систему можно определить безо всякого труда. Отключая разъём CAN-бус на управляющем устройстве, и подключая разъём на распределителе потенциалов, можно определить, находится ли причина неисправности в кабельном соединении или в управляющем устройстве. Если на осциллоскопе можно распознать сигналы, то система CAN-бус находится в рабочем состоянии и кабельное соединение также находится в рабочем состоянии. Если после подключения управляющего устройства сигналы на осциллоскопе распознать невозможно, то причина неисправности заключается в неисправности самого управляющего устройства. Если установлен факт неисправности кабельного соединения, то, измеряя сопротивление и напряжение, можно определить замыкание на массу или на плюс, или замыкание между проводами.

В автомобилях, не имеющих распределителя потенциалов, поиск неисправности потребует значительно больших усилий. Осциллоскоп придётся подключать к проводам CAN-бус в подходящем для этого месте (например, на разъёмном соединении блока управления). Затем нужно по очереди снимать все управляющие устройства, и разъёмные соединения CAN-бус отсоединять непосредственно от блоков управления. В этом случае также необходимо иметь техническую документацию с данными об автомобиле, чтобы определить, какие управляющие устройства и где расположены. Перед отключением разъёмов и после отключения разъёмов необходимо наблюдать за изображением на экране осциллоскопа. Последующие действия ничем не отличаются от тех, которые мы осуществляли на примере нашего автомобиля.
Для проверки резисторных перемычек нужно, чтобы CAN-бус находился в состоянии покоя (Sleepmode). Управляющие устройства при проведении измерений должны быть подключены. Общее сопротивление, которое складывается параллельно включённых одинаковых резисторов по 120 Ом, составляет 60 Ом. Это сопротивление измеряется между проводниками CAN- High и CAN-Low.
Установка дополнительных устройств
Установка дополнительных устройств, например, систем навигации, для работы которых необходимо получение сигналов из системы CAN-бус, является сложной проблемой. Она заключается, в первую очередь, в том, чтобы найти удобное место для доступа, например, к получению сигнала скорости автомобиля, а сделать это, не имея под рукой технической документации автомобиля, очень сложно.
Во всемирной сети существуют сайты, где можно найти информацию о способах и местах подключения и установки различных устройств. Эти сведения, разумеется, не дают никаких гарантий, поэтому в любом случае весь риск на себя берёт авторемонтная мастерская, если решится использовать такие данные. Однако в любом случае самый надёжный способ — это ознакомиться с технической документацией производителя автомобиля. Для того, чтобы познакомиться со всеми возможными системами CAN-бус, изучить передачу данных, устройство, работу и поиск неисправностей, далее — как можно устанавливать дополнительные устройства — мы в любом случае советуем пройти специальное обучение.
www.avtodiagnostika.info
Как работает CAN шина в современном авто
Для того, чтобы понять принципы работы CAN-шины мы решили написать/перевести ряд статей, посвященных этой тематике, как обычно, основываясь на материалах зарубежных источников.
Одним из подобных источников, который, как нам показалось, вполне подходящим образом иллюстрирует принципы работы CAN-шины, стал видеоролик-презентация учебного продукта CANBASIC компании Igendi Engineering (http://canbasic.com).
Также можете прочитать вторую нашу переводную статью Введение в CAN.
Добро пожаловать на презентацию нового продукта CANBASIC, учебной системы (платы), посвященной вопросу функционирования шины КАН (CAN).
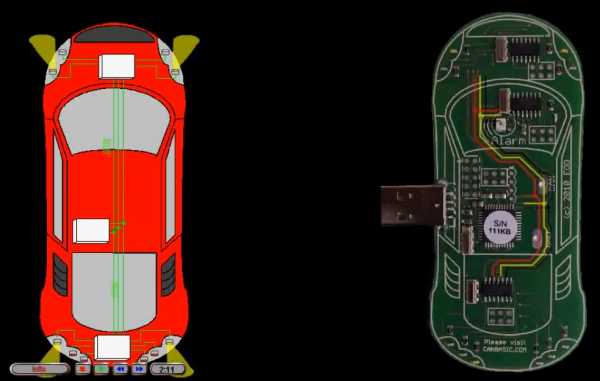
Мы начнем с основ построения сети CAN-шины. На схеме приведен автомобиль с его системой освещения.

Показана обычная проводка, в которой каждая лампа напрямую подключена с каким-либо переключателем или контактом педали тормоза.

Теперь аналогичная функциональность показана с применением технологии CAN-шины. Передние и задние световые приборы подключены к контролирующим модулям. Контролирующие модули соединены параллельно с такими же проводами шины.
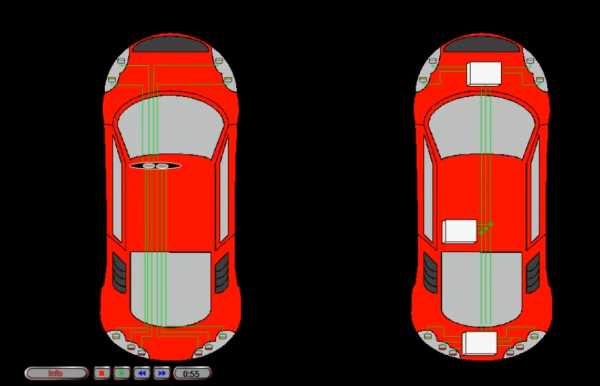
Этот небольшой пример демонстрирует, что объем электропроводки снижается. Вдобавок ко всему модули управления могут обнаруживать перегоревшие лампы и информировать об этом водителя.
Автомобиль на указанном виде содержит четыре модуля управления и четко отражает построение учебной системы (платы) CANBASIC
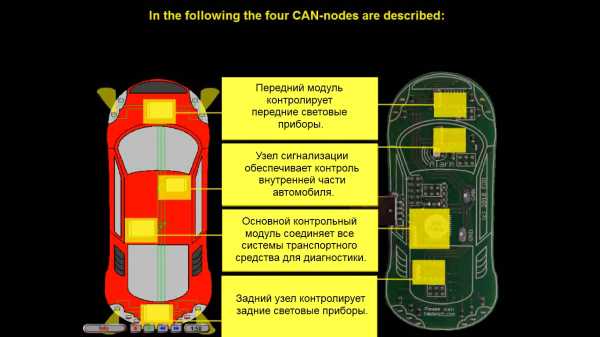
В вышеописанном указано четыре узла шины (CAN-узла).
Передний модуль контролирует передние световые приборы.
Узел сигнализации обеспечивает контроль внутренней части автомобиля.
Основной контрольный модуль соединяет все системы транспортного средства для диагностики.
Задний узел контролирует задние световые приборы.
На тренировочной доске CANBASIC вы можете увидеть маршрутизацию (расположение) трех сигналов: «Питание», «CAN-Hi» и «земли», соединяющихся в контрольном модуле.
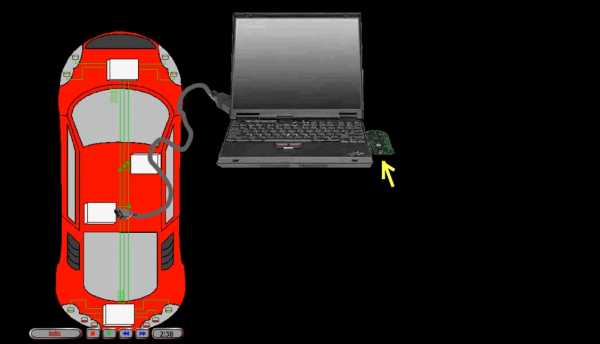
В большинстве транспортных средств для подключения главного модуля управления к ПК с помощью диагностического программного обеспечения вам нужен OBD-USB конвертер.
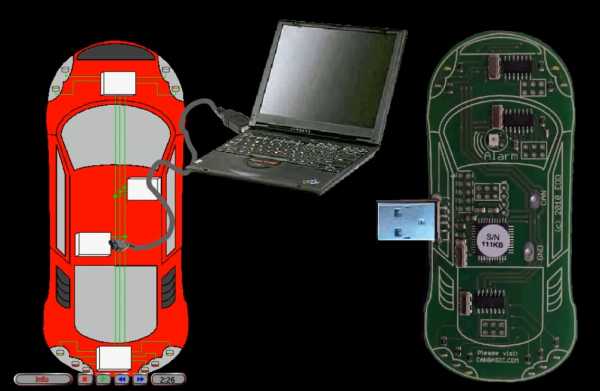
Плата CANBASIC уже содержит в себе OBD-USB конвертер и может быть напрямую подключена к ПК.
Питается плата от интерфейса USB, поэтому дополнительные кабели не нужны.
Провода шины используются для передачи множества данных. Как это работает?
Как работает CAN-шина
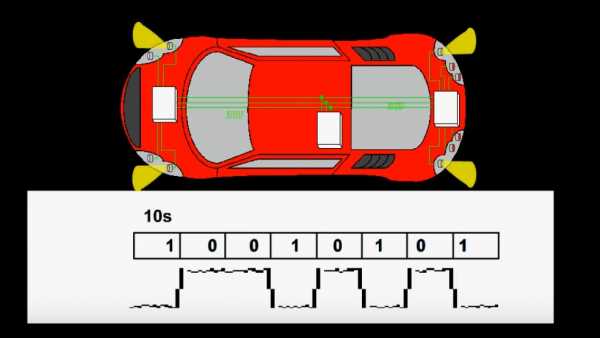
Эти данные передаются последовательно. Вот пример.
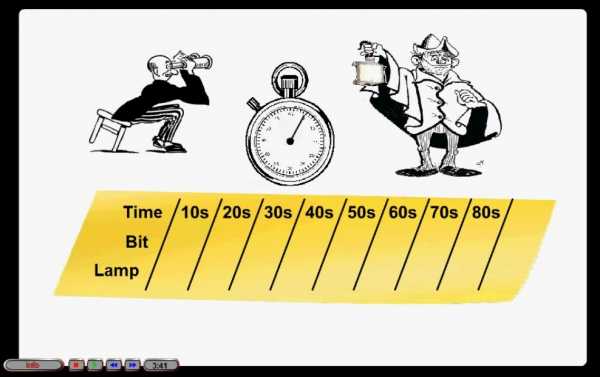
Человек с лампой, передатчик, хочет отправить какую-то информацию человеку с телескопом, получателю (приемнику). Он хочет передать данные.
Для того, чтобы сделать это они договорились, что получатель смотрит за состоянием лампы каждые 10 секунд.
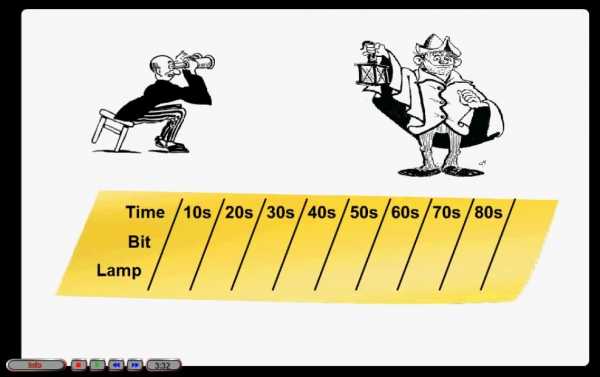
Это выглядит так:
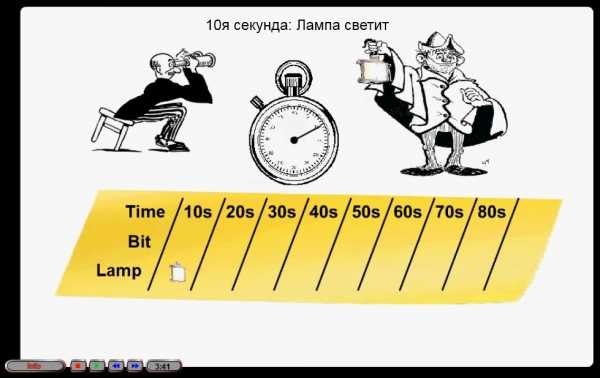
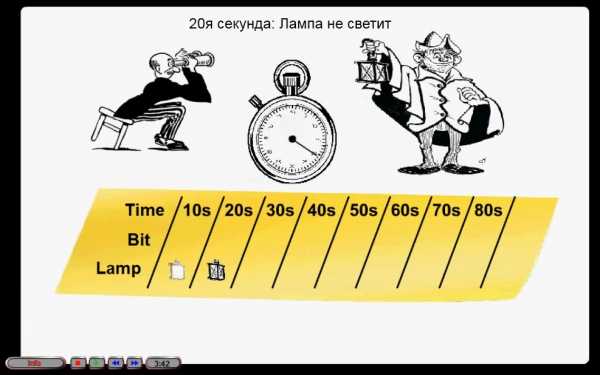
Спустя 80 секунд:
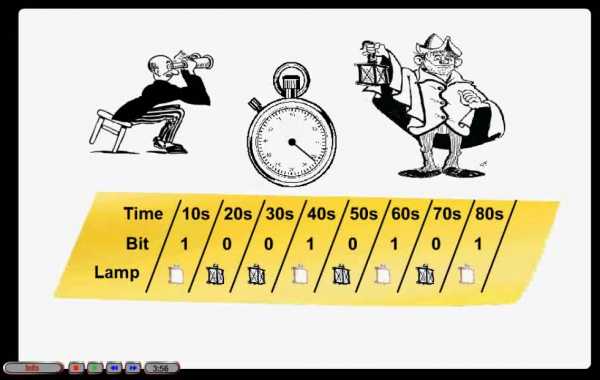
Теперь 8 бит данных были переданы со скоростью 0,1 бит в секунду (т.е. 1 бит в 10 секунд). Это называется последовательной передачей данных.
Для использования этого подхода в автомобильном приложении интервал времени сокращается с 10 секунд до 0,000006 секунды. Для передачи информации посредством изменения уровня напряжения на шине данных.
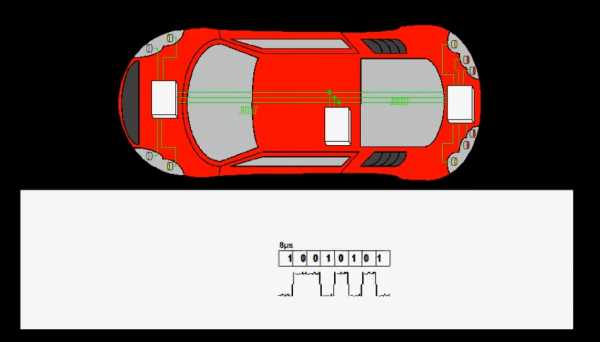
Для измерения электрических сигналов шины КАН используется осциллограф. Две измерительных площадки на плате CANBASIC позволяют измерить этот сигнал.
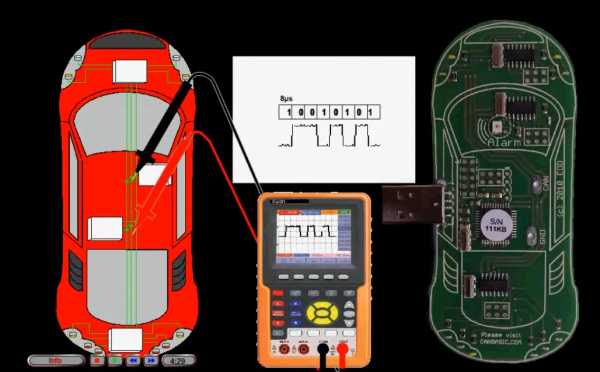
Чтобы показать полное CAN-сообщение разрешение осциллографа уменьшается.
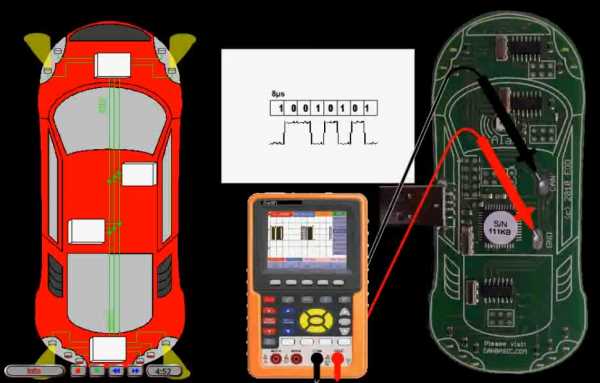
В результате одиночные CAN-биты больше не могут быть распознаны. Для решения этой проблемы CANBASIC-модуль оснащен цифровым запоминающим осциллографом.
Мы вставляем модуль CANBASIC в свободный разъем USB, после чего он будет автоматически обнаружен. Программное обеспечение CANBASIC можно запустить прямо сейчас.
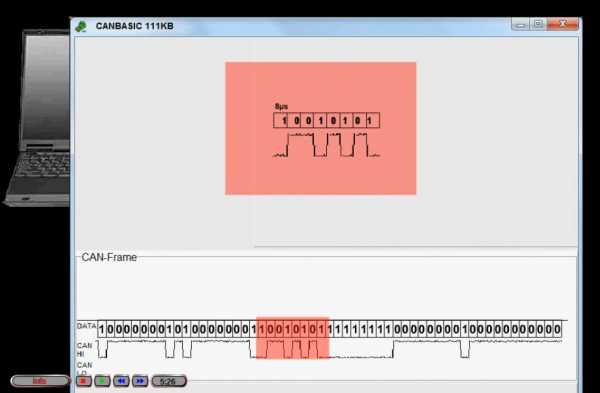
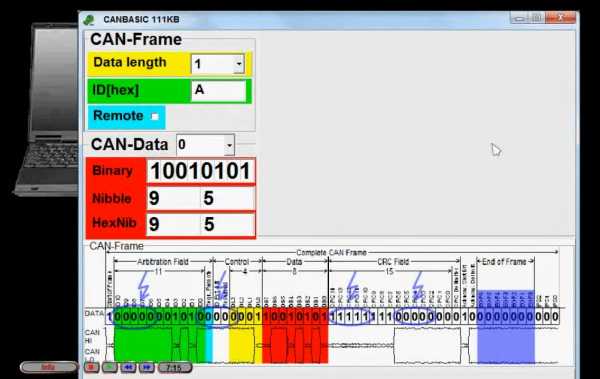
Вы можете видеть вид программного осциллографа с прикрепленными значениями битов. Красным показаны данные, переданные в предыдущем примере.
Чтобы объяснить другие части CAN-сообщения мы раскрашиваем CAN-кадр и прикрепляем на него подписи с описанием.
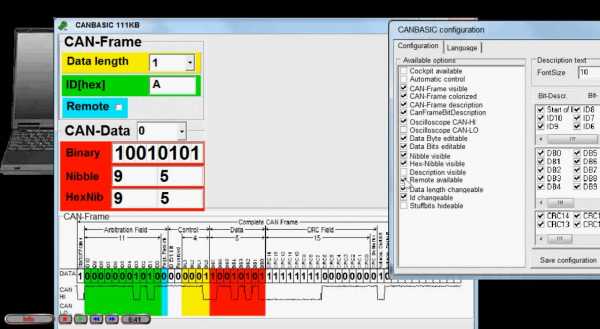
Каждая раскрашенная часть CAN-сообщения соответствует полю ввода того же цвета. Область, отмеченная красным, содержит информацию о пользовательских данных, которая может быть задана в формате битов, полубайтов или шестнадцатиричном формате.
Желтая область определяет количество пользовательских данных. В зеленой зоне может быть установлен уникальный идентификатор.
Синяя область позволяет задать CAN-сообщение для удаленного запроса. Это означает, что будет ожидаться ответ от другого CAN-узла. (Разработчики системы сами рекомендуют не пользоваться удаленными запросами по ряду причин приводящих к глюкам системы, но об этом будет другая статья.)
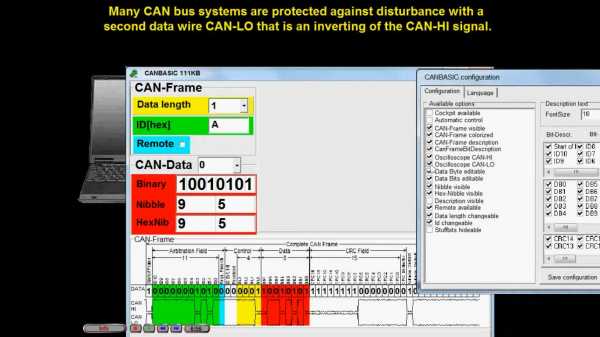
Многие системы с шиной CAN защищены от помех вторым каналом CAN-LO для передачи данных, который является инвертированным относительно сигнала CAN-HI (т.е. идет тот же сигнал, только с обратным знаком).
Шесть последовательных битов с одинаковым уровнем определяют конец CAN-кадра.
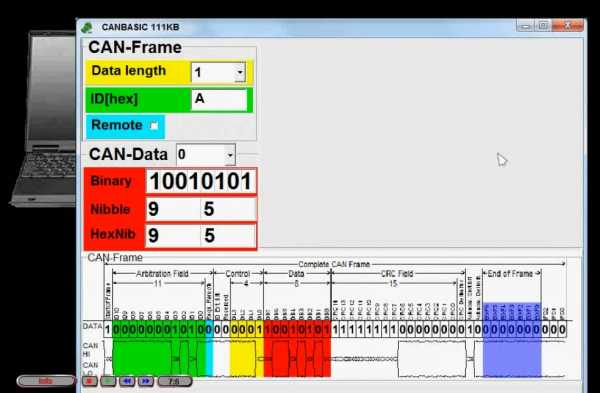
Так совпало, что другие части CAN-кадра могут содержать более пяти последовательных битов с одинаковым уровнем.
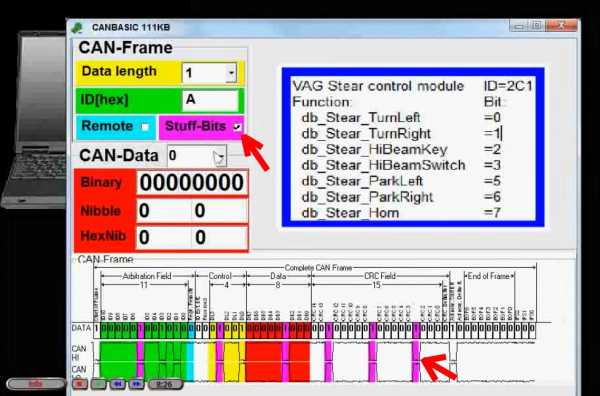
Чтобы избежать этой битовой метки, если появляется пять последовательных битов с одинаковым уровнем, в конце CAN-кадра вставляется противоположный бит. Эти биты называют стафф-битами (мусорными битами). CAN-приемники (получатели сигнала) игнорируют эти биты.
С помощью полей ввода могут быть заданы все данные КАН-кадра и поэтому каждое КАН-сообщение может быть отправлено.
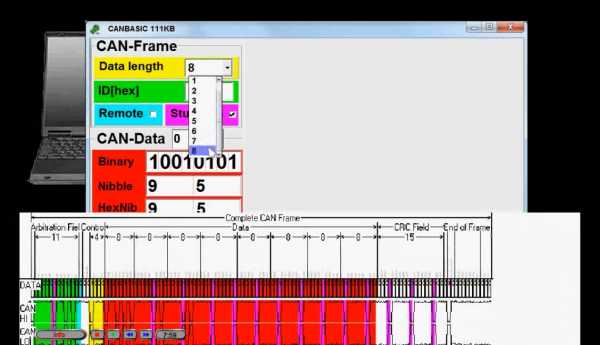
Вставленные данные немедленно обновляются в CAN-кадре, в данном примере длина данных будет изменена с одного байта на 8 байтов и сдвинута назад на один байт.
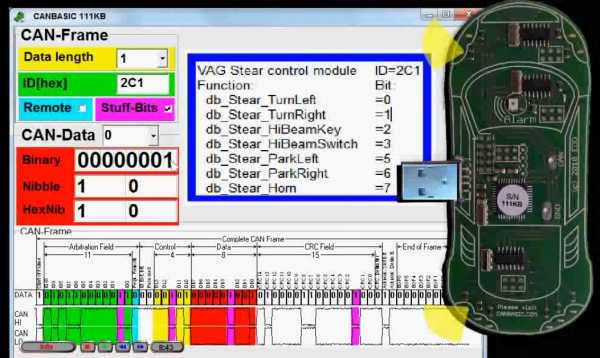
Текст описания показывает, что сигнал поворота будет управляться с помощью идентификатора «2С1» и бит данных 0 и 1. Все биты данных сбрасываются на 0.
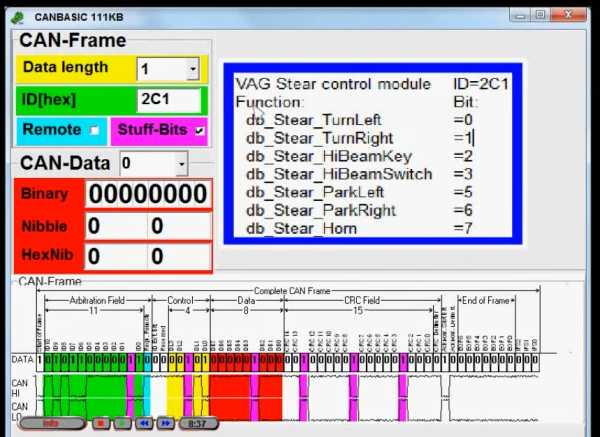
Идентификатор установлен в значение «»2С1». Для активации сигнала поворотов бит данных должен быть установлен с 0 на 1.
В режиме «в салоне» вы можете управлять всем модулем с помощью простых щелчков мыши. Данные CAN устанавливаются автоматически в соответствии с желаемым действием.
Лампы поворотников могут быть установлены на ближний свет для работы в качестве ДХО. Яркостью будет управлять широтно-импульсная модуляция (ШИМ), в соответствии с возможностями современной диодной техники.
Теперь мы можем активировать фары ближнего света, противотуманные фары, стоп-сигналы и фары дальнего.

С отключением ближнего света противотуманные фары также отключаются. Логика управления световой системой CANBASIC соответствует автомобилям марки Volkswagen. Особенности зажигания и «возвращения домой» также включены.
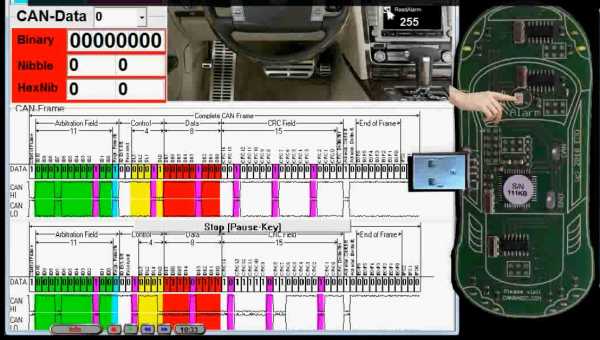
С сигнальным узлом вы можете считывать сигнал датчика после инициирующего удаленного запроса.
В режиме удаленного запроса второй CAN-кадр будет принят и показан ниже отправленного CAN-кадра.
Байт данных CAN теперь содержит результат измерения датчика. С приближением к датчику пальца вы можете изменить измеренное значение.
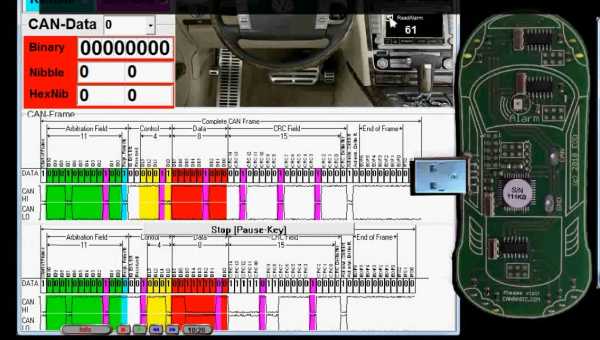
Клавиша паузы замораживает текущий CAN-кадр и позволяет провести точный анализ.
Как уже было показано, различные части CAN-кадра могут быть скрыты.
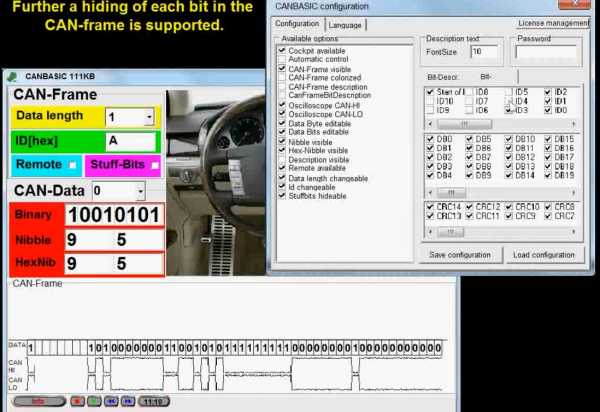
Кроме того поддерживается скрытие каждого бита в КАН-кадре.
Это очень полезно, если вы хотите использовать представление CAN-кадра в ваших собственных документах, например в листе упражнений.
www.beworks.ru